Design
What
Matters.
Yue You is currently a product designer at Flowith AI. Previously a research assistant at Teachable AI Lab at Georgia Tech, XR/UX design intern at ServiceMaster, UX designer at Xavor Corporation.
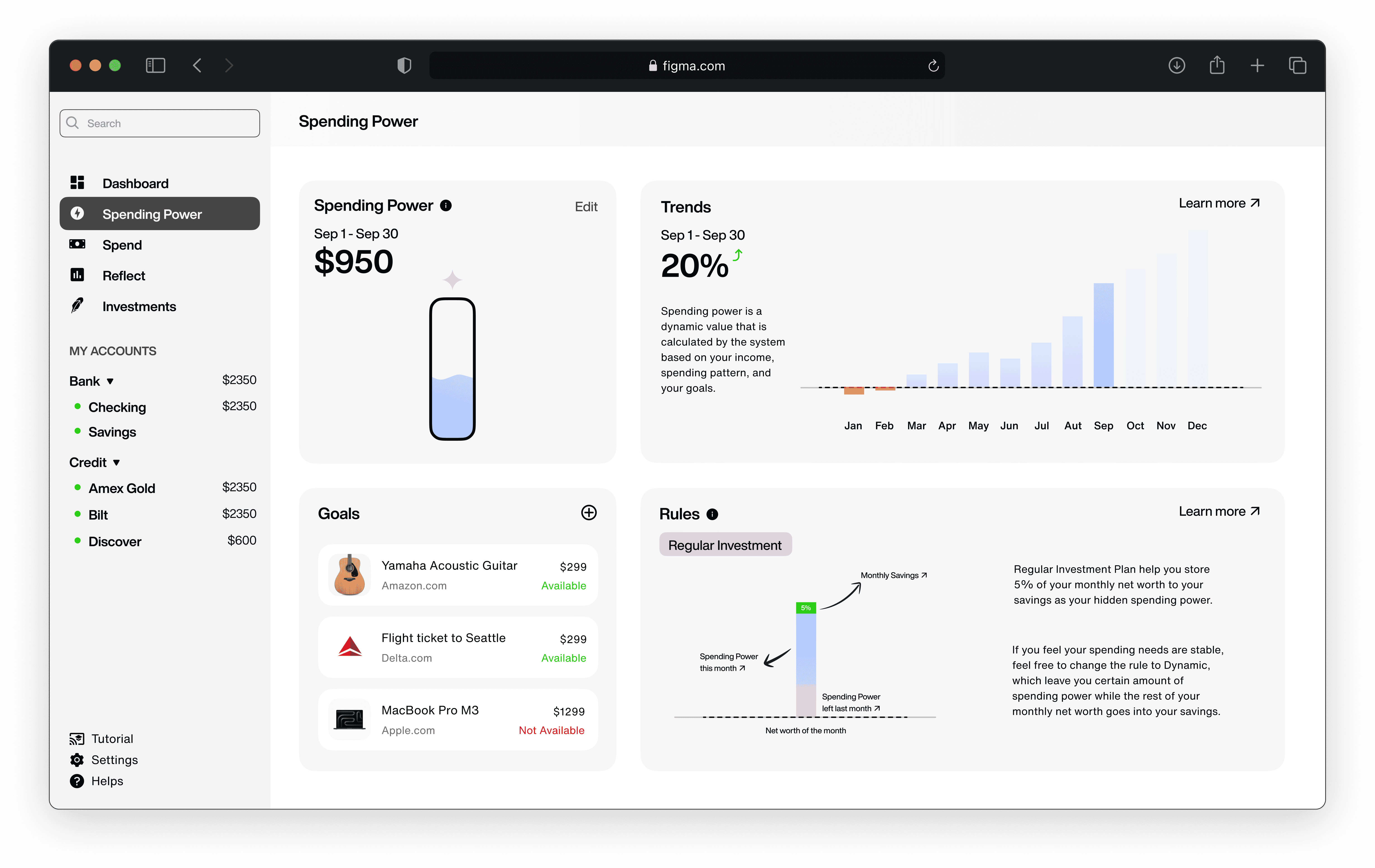
UX Design, Case Study
An AI-powered web-platform that empowers individual spending and saving ability by proactively engage with users financial activity.
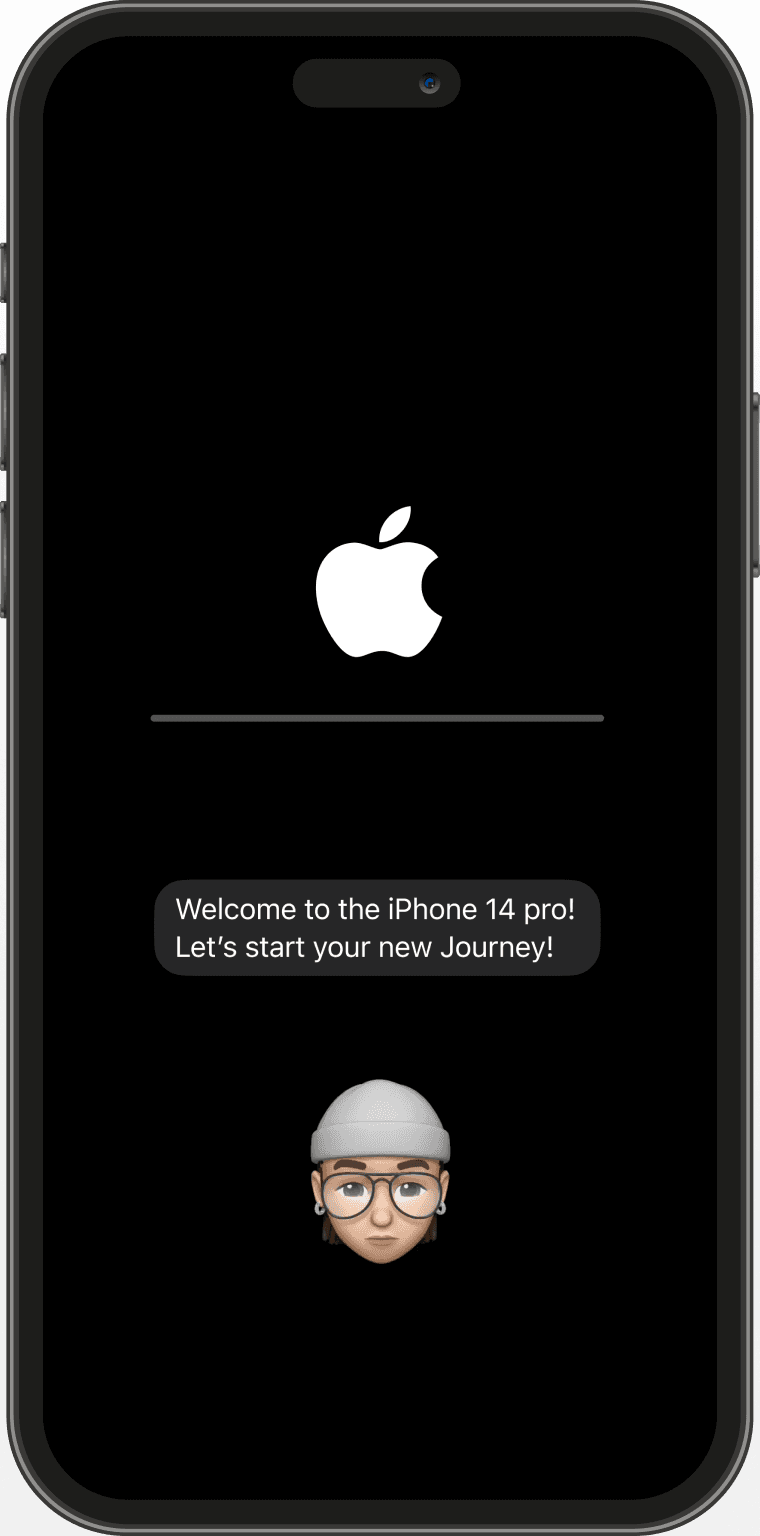
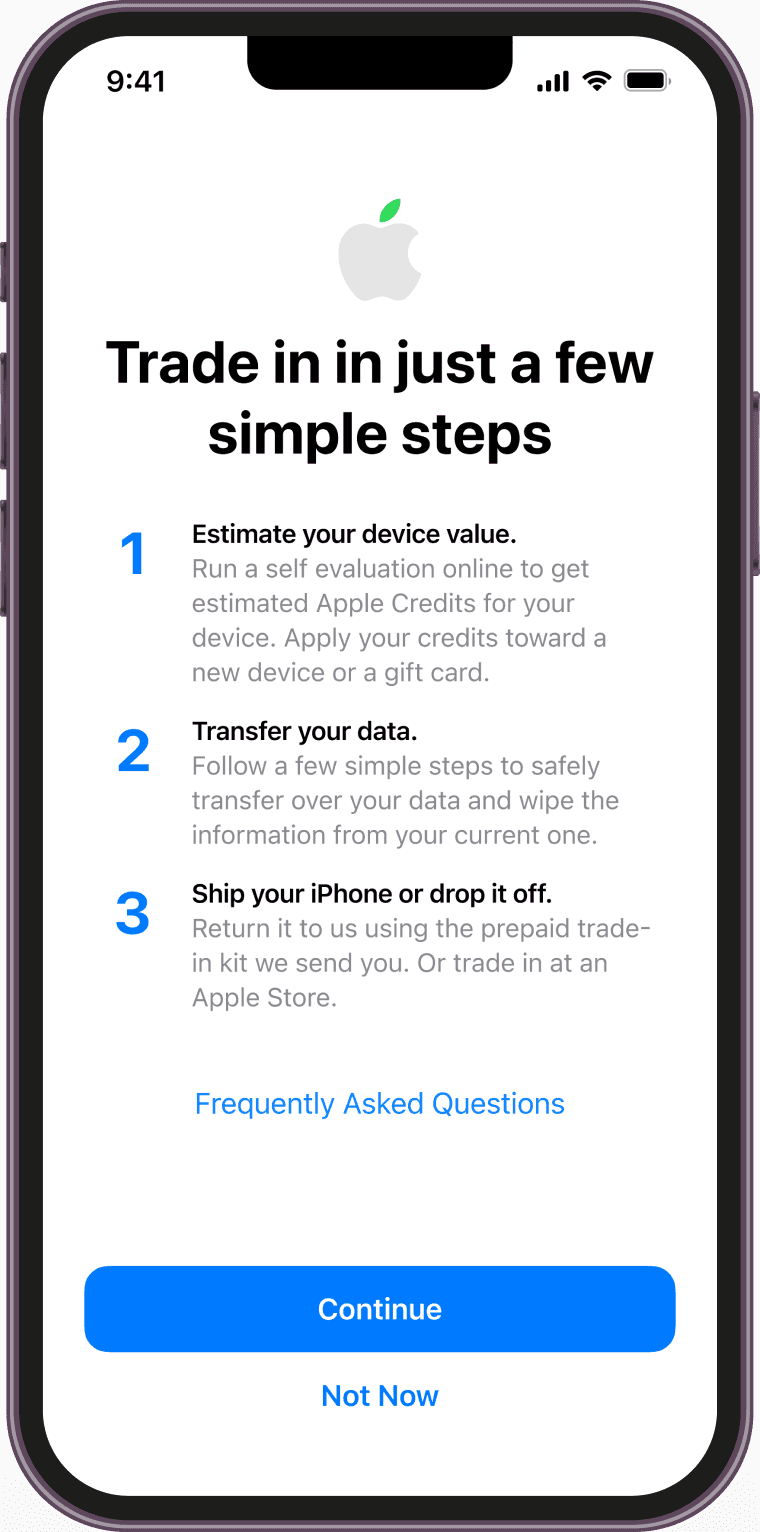
UX Design, Case Study
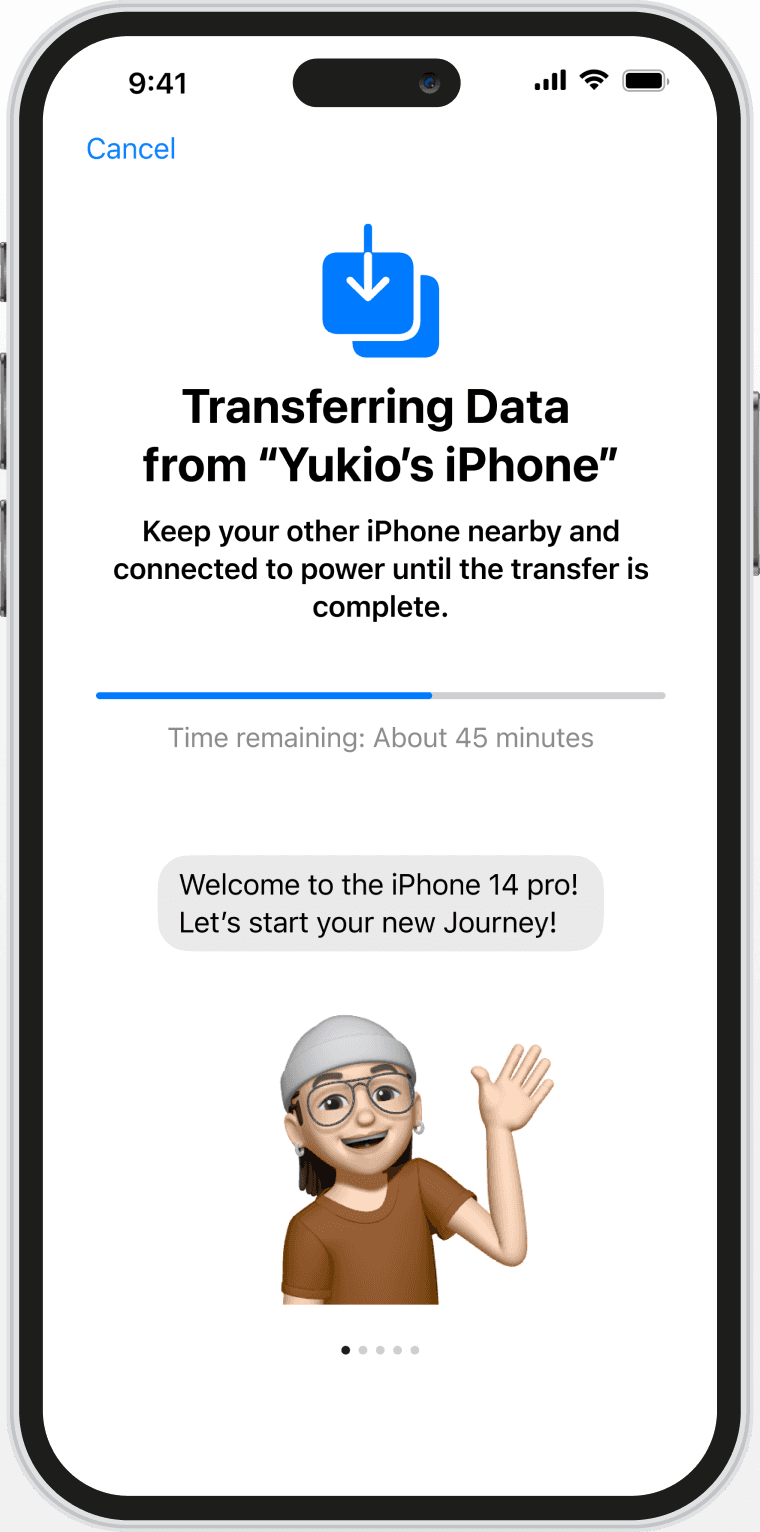
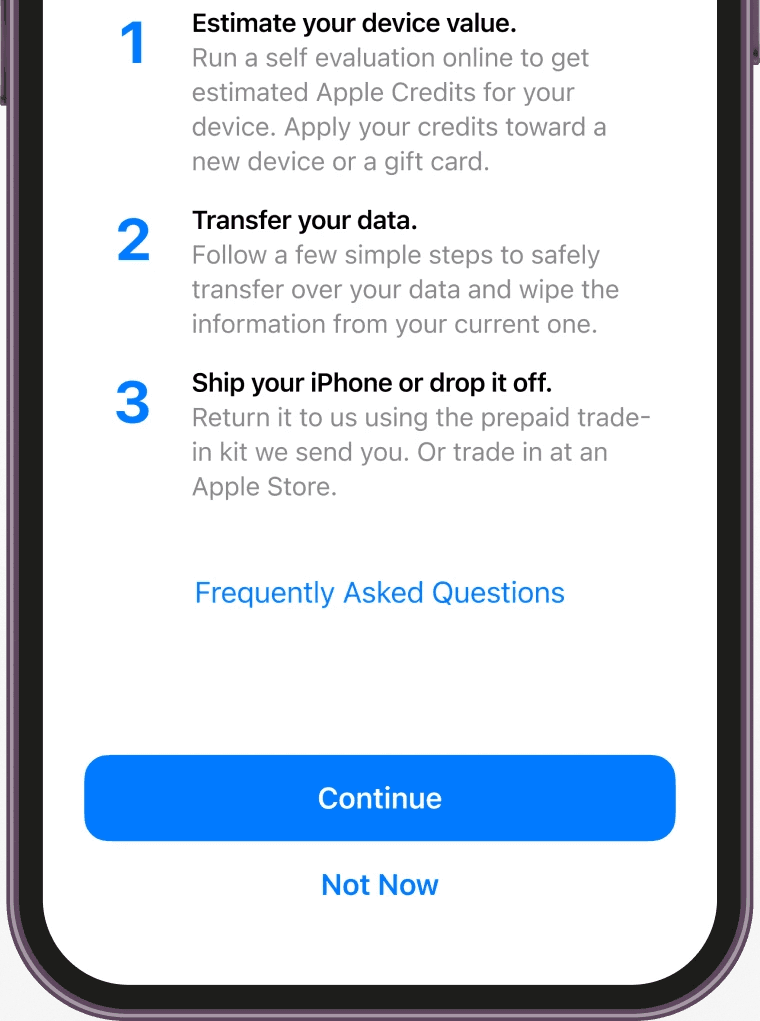
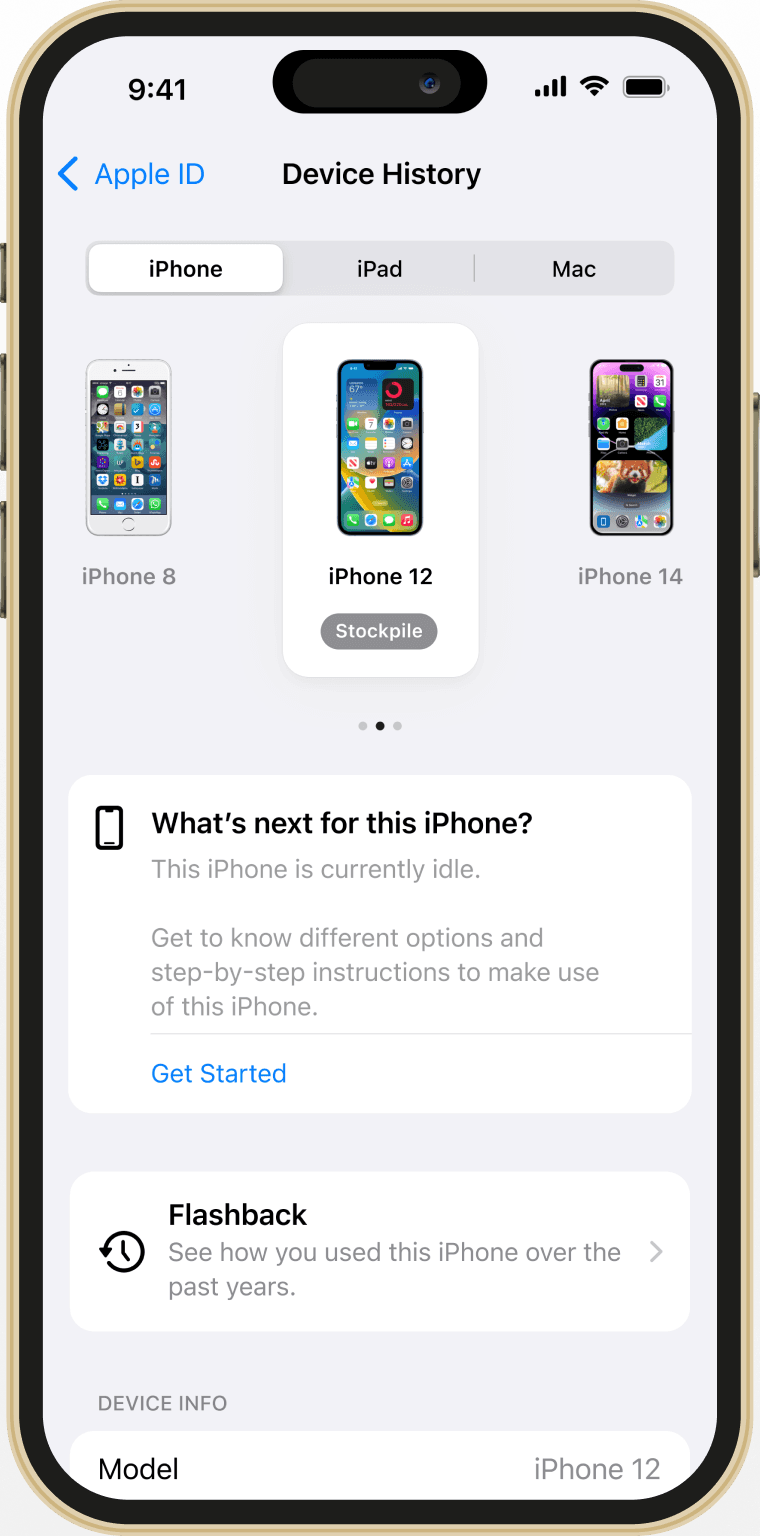
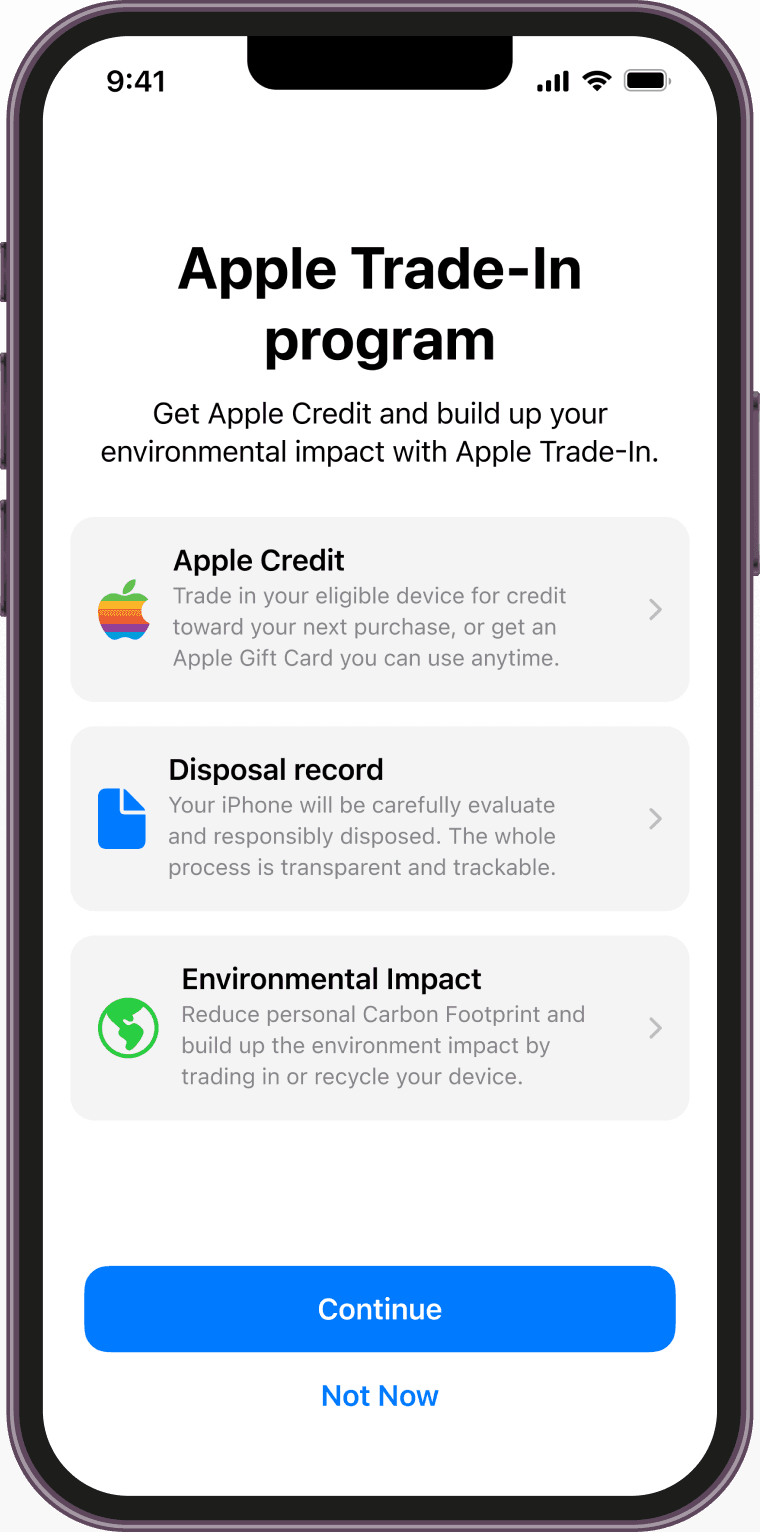
A data transmission experience encouraging circular economy best practices with positive environmental implications.



Product Design, Service Design
An interactive chessboard paired with an app that allows migrant elderly to play chess with other online players.

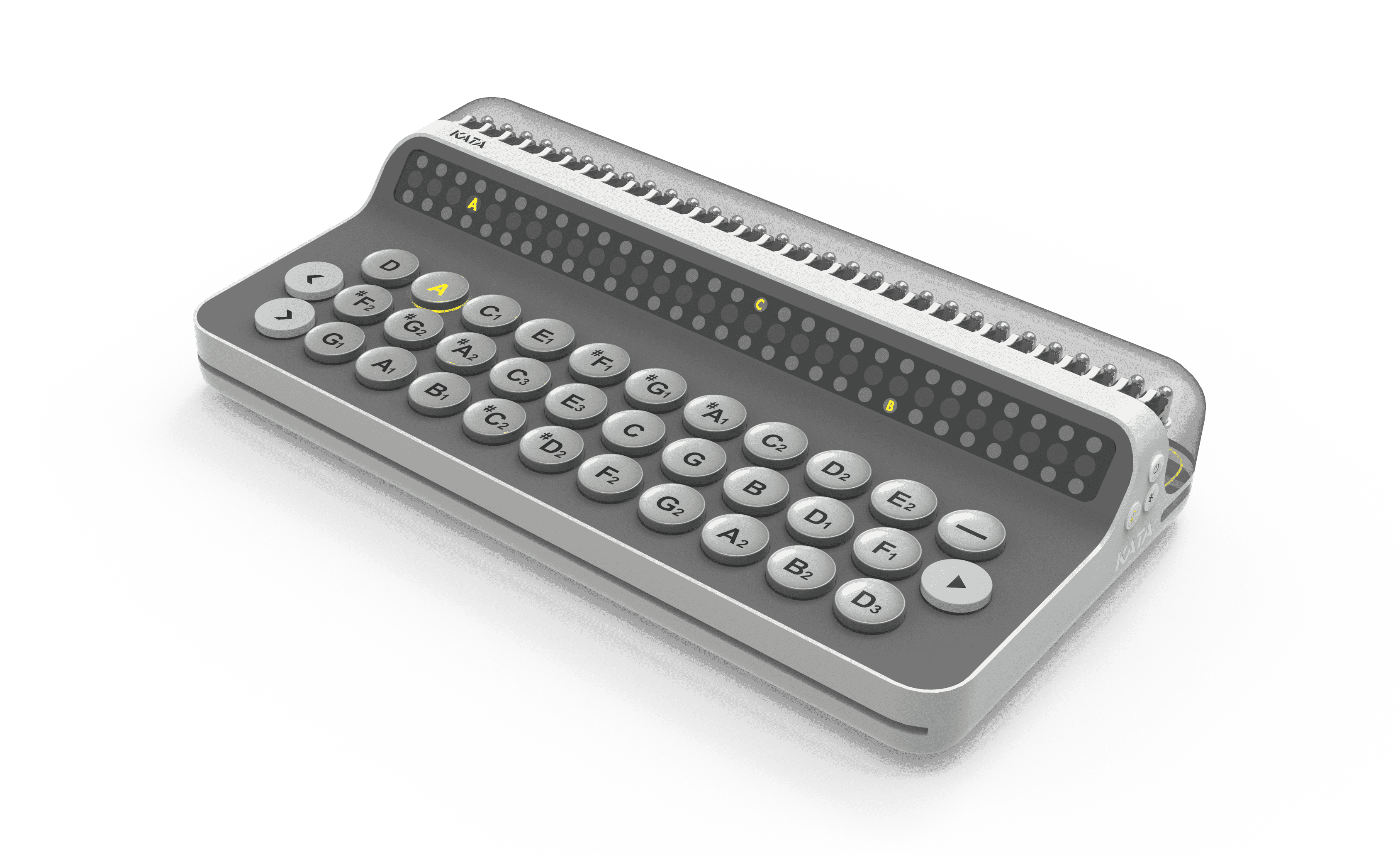
Physical Prototyping, Product Design
Reframe and promote the playing experience of 30-combs paper-tape music box.